Sensations, caractère, effet Doppler, et fréquences d'alerte
Par rapport au moteur électrique, le moteur thermique offre beaucoup plus de sensations, surtout s'il est équipé d'une boîte de vitesses mécanique ou robotisée qui implique des variations de régime (environ x 5 à x 10 par rapport au ralenti), de charge, et donc de bruit, avec une intensité de ce bruit qui augmente de façon exponentielle par rapport au régime et à la charge moteur et aux différentes fréquences associées (environ + 10 dB à chaque doublement du régime si bruit d'admission dominant). Le changement manuel des rapports de boîte permet de conserver la maîtrise du régime moteur et des sensations associées en fonction de la variation du couple, du frein moteur, des vibrations et de la sonorité, avec sur chaque rapport de boîte un régime moteur proportionnel à la vitesse et une sonorité liée à l’ouverture des gaz qui donnent un bon retour d’information sur la dynamique du véhicule et sa motricité.
Les vibrations importantes et le bruit associé peuvent être transmis par voie solidienne (via le châssis du véhicule et le corps du conducteur, de la même façon que les écouteurs à conduction osseuse), ce qui renforce les sensations, en particulier en moto où le pilote est en contact proche avec le moteur souvent monté rigide dans le cadre ou la partie cycle.
Le rapport poids/puissance avec un moteur thermique est également plus favorable à autonomie égale (mais l'autonomie des batteries va évoluer) ce qui permet de meilleurs sensations.
Le couple du moteur, mesuré en Nm, correspond à la somme des forces entraînant la rotation du vilebrequin, et en terme de sensation, à une puissance importante à bas régime, permettant une forte reprise de vitesse sans rétrograder.
La puissance du moteur, mesurée en kw ou ch (1 ch = 736 w), correspond au couple du moteur x vitesse de rotation du vilebrequin, et en terme de sensation, à une accélération maximale au régime de puissance.
Les sensations sont amplifiées en cas d'irrégularité ou d'augmentation importante des valeurs de couple en fonction du régime moteur ou lors du seuil de fonctionnement d'un turbocompresseur (moteurs équipés) souvent associé à un temps de réponse (lag) amplifiant une hausse rapide du couple.
Si le couple maxi n'est atteint qu'à un régime proche en pourcentage de celui correspondant à la puissance maxi ou au régime maxi, on dit que le moteur est "pointu", avec généralement de longues montées en régime, mais au détriment des reprises et du fonctionnement à bas régime.
A cylindrée égale, un nombre de cylindres, une puissance et un régime de puissance maxi plus élevés ne donne pas systématiquement un moteur plus pointu, par exemple une moto Yamaha 900 MT-09 3 cylindres de 2022 a un couple maxi de 9,5 m.kg à 7000 tr/min soit à 70% du régime de puissance maxi à 10 000 tr/min, alors que la TDM 900 bicylindre de 2001 a un couple de 9,1 m.kg à 6000 tr/min soit à 80% du régime de puissance maxi à 7500 tr/min, mais la valeur de couple est également à comparer avant le régime de couple maxi (et au delà du régime de puissance maxi en utilisation sportive) pour évaluer la réelle plage d’utilisation efficace du moteur associée au nombre de rapports et à l’étagement de la boîte de vitesses, avec un avantage en terme d’élasticité à bas régime avec un nombre plus élevé de cylindres et des intervalles d’allumage égaux.
Si le couple maxi est atteint dès les bas régimes, on dit que le moteur est "coupleux", voire "souple" si la régularité cyclique est suffisante, ce qui favorise les reprises, généralement au détriment de la puissance maxi à haut régime.
Si l’écart entre le régime de puissance maxi et le régime maxi est important avec une puissance qui ne diminue pas trop vite et permet de prolonger efficacement une accélération jusqu’à la zone rouge, on dit que le moteur a de l’alllonge.
Les moteurs Diesel ont un couple important à bas régime mais qui diminue beaucoup avec le régime, ce qui permet en contrepartie une bonne réserve de couple [rapport C1/C2 ou 100 x (C1- C2)/C2 en %, avec C1 couple maxi et C2 couple au régime de puissance] s'opposant à une baisse de régime en dessous du seuil de couple maxi lorsque la charge augmente, ce qui est primordial par exemple sur les tracteurs agricoles utilisés à pleine puissance en évitant un rétrogradage lors d'une augmentation ponctuelle de charge.
Contrairement aux moteurs atmosphériques, les moteurs suralimentés ont souvent un couple constant (à partir de 1500 tr/min environ en automobile) jusqu'à un régime proche de celui correspondant à la puissance maxi.
La caractère d'un moteur n'est pas seulement lié à ses performances et à la façon dont la puissance est délivrée, mais également à son architecture qui détermine à la fois son équilibrage dynamique, son cycle d'explosion et la sonorité associée, ces caractéristiques étant facilement reconnaissables à l'utilisation (surtout si moins de six cylindres) par l'onctuosité ou au contraire le cognement du moteur à très bas régime, les vibrations ressenties (en moto), et surtout le timbre d'échappement, ce qui est avant tout l'objectif de ce blog qui vise à recenser les différentes sonorités, pouvant être agréables (voire envoûtantes !) ou non mais celà reste subjectif et toujours source d'avis passionnés chez les amateurs de "belles" mécaniques.
Voir Moto Journal n°2279 du 06/05/2020, article technique "Les dessous du caractère moteur".
Le niveau sonore des moteurs de compétition, contrairement à celui des moteurs de série, est peu atténué par le système d'échappement ce qui peut être considéré comme une nuisance ou un danger pour le système auditif des spectateurs mais permet aux harmoniques moteur d'être beaucoup moins masqués par les bruits ambiants, par ceux des accessoires, de la transmission, des pneumatiques à basse vitesse et par le bruit aérodynamique à fréquences élevées à haute vitesse. Pour les sons embarqués, il n'y a pas de filtrage ou de résonance d'habitacle sur motos et voitures monoplaces type F1 mais le son perçu par le pilote peut être atténué par le casque et par des protections auditives.
Lors du passage d’un véhicule en ligne droite à vitesse élevée et constante, les fréquences sonores enregistrées à un point fixe sur la trajectoire du véhicule seront modifiées selon l’effet Doppler par rapport aux fréquences émises par le véhicule, avec des valeurs plus hautes à l’approche du véhicule et plus basses à l’éloignement tout en restant constantes dans chaque direction.
Un spectateur immobile en bord de route aura en revanche la sensation que les fréquences augmentent progressivement selon la proximité du véhicule, cette sensation étant due à l’augmentation d’intensité du son.
L’effet Doppler sera plus marqué avec des véhicules aux fréquences dominantes hautes et de forte intensité sonore masquant les bruits de roulement et aérodynamiques, notamment si vitesse très élevée avec moteur à très haut régime et pleine charge et sans restriction de bruit à l’échappement, comme les regrettés 12 cylindres, V10, et V8 atmosphériques de Formule 1 aux régimes de puissance atteignant 13 000 tr/min en 1990, et même 19 000 tr/min dès 2003 avec soupapes en titane à rappel pneumatique.
Les fréquences enregistrées sur la trajectoire d’un véhicule lancé à une vitesse V et émettant une fréquence dominante F peuvent être calculées avec les formules ci-après :
F1 = F x [ 1 + ( V / [ C - V ] ) ] à l’approche du véhicule
F2 = F x [ 1 - ( V / [ C + V ] ) ] à l’éloignement du véhicule
avec
C = vitesse de l'onde sonore (environ 340 m/s à 15°C ou 349 m/s à 30°C avec une pression de 1013 hPa)
F1 = fréquence dominante enregistrée lors de d'approche
F2 = fréquence dominante enregistrée lors de l'éloignement
A partir des fréquences enregistrées lors du passage du véhicule, on peut calculer la vitesse V suivant la formule ci-après :
V = C x (F1 - F2) / (F1 + F2)
La vitesse calculée sera inférieure à la réalité si on s'éloigne de la trajectoire du véhicule, la valeur enregistrée devant être divisée par le cosinus de l’angle (approximatif) entre la trajectoire du véhicule et la droite passant par ce véhicule et le point d’enregistrement au début de celui-ci. Si l'angle est limité à 6°, par exemple avec un point d'enregistrement à 6 m de la trajectoire et un véhicule à 60 m du point de passage sur la trajectoire, la fréquence enregistrée ne nécessitera pas de correction car le cosinus sera de 0,9945, donc très proche de 1, et le sonagramme donnera une fréquence constante avant et après le point de passage.
Cet angle est de 25° avec un cosinus de 0,9 sur les radars de contrôle de vitesse (fonctionnant également suivant effet Doppler mais par réflexion d'une onde électromagnétique).
La vitesse V du véhicule étant connue, on peut en déduire le régime moteur suivant son architecture (identification si nécessaire à partir du sonagramme) et suivant la fréquence dominante F émise par le moteur, à calculer suivant l’une des 2 formules ci-après :
F = F1 x [ 1 - ( V / C ) ] ou F = F2 x [ 1 + ( V / C ) ]
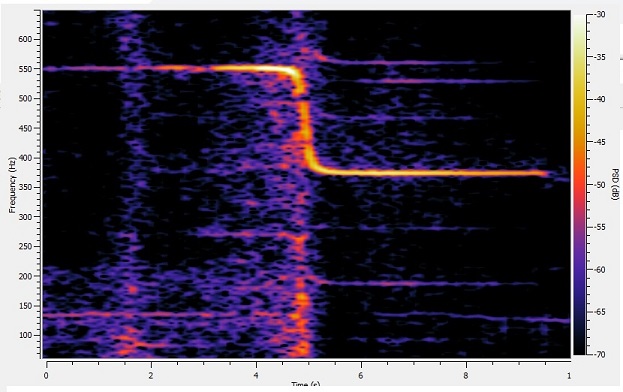
Exemple d’effet Doppler avec moto Yamaha R6 4 cylindres 4 temps de 600 cm3, montrant une fréquence dominante de 550 Hz en approche, réduite à 375 Hz en éloignement, d'après une vidéo (fly by), ce qui donne une vitesse de 64,32 m/s (231,57 km/h), une fréquence émise de 446 Hz et un régime moteur de 13380 tr/min, si on néglige la distance d'environ 6 m du point d'enregistrement par rapport à la trajectoire du véhicule.
L'effet Doppler est important avec les avertisseurs sonores des véhicules routiers prioritaires ou d'intervention rapide qui émettent un son normalisé d'un niveau sonore de 110 dB en journée (abaissé à 70-90 dB la nuit sauf pour les pompiers et gendarmes) avec plusieurs fréquences sonores sinusoïdales alternées :
- 435 et 580 Hz pour la police (rapport de fréquence harmonique de 4/3, nommé quarte juste en musique)
- 435 et 732 Hz pour la gendarmerie
- 435 et 651 Hz pour le SAMU (rapport de fréquence harmonique de 3/2, nommé quinte juste en musique)
- 435 et 488 Hz pour les pompiers
- 420, 516, et 420Hz pour les ambulances
avec une cadence de 20 à 30 cycles par minute pour les pompiers et 50 à 60 fois pour les autres, la fréquence de 435 Hz étant légèrement inférieure à un LA de 440Hz mais perçue à une hauteur supérieure lors de l'approche du véhicule.
A noter que la fréquence du LA définie par le compositeur italien Giuseppe Verdi était de 432 Hz, valeur apaisante correspondant à des fréquences naturelles de la terre. Cette fréquence correspond par exemple à celle des allumages équidistants d'un V10 à 72° 4 temps au régime de 5184 tr/min.
L'effet Doppler et la présence d'harmoniques multiples des tons émis entraîne une perception de fréquences jusqu'à plus de 4000 Hz qui augmente le centre de gravité du spectre sonore, avec une amplitude maximale pour des fréquences supérieures à 1000 Hz qui sont mieux perçues par l'oreille humaine que les basses fréquences, celles-ci en contrepartie ayant une meilleure propagation dans l'air avec une atténuation plus faible avec la distance.
L'avertisseur pneumatique des véhicules ferroviaires (SNCF et autres réseaux européens), très puissant (125 dB à 5 m et près de 140 dB à 1 m), est commandé manuellement par un levier bi-directionnel qui déclenche 2 tons distincts à timbre de type cuivre, avec des fréquences correspondant à des notes de musique d'un clavier tempéré :
- ton aigu de 660 Hz (note MI de l'octave 4)
- ton grave de 370 Hz (note FA # de l'octave 3)
Simulation de l'avertisseur 2 tons SNCF sur arrangeur Yamaha E463 avec son "Under Heim" n° 158,
avec au début de l'extrait, la séquence la plus courante ci-après :
- aigu bref (environ 0,3 sec)
- grave long (environ 1 sec)
- aigu moyen (environ 0,6 sec)
Le rapport de fréquence le plus désagréable entre 2 tons de klaxon correspond à l'intervalle de hauteur le plus dissonant entre 2 notes de musique, appelé triton, soit un intervalle de 3 tons, ou 6 1/2 tons (par exemple entre FA et SI sur la gamme de DO majeur) avec un rapport de fréquence d'environ 1,414 pour une gamme tempérée à 1/2 tons égaux, ou 9/8 pour une gamme de Pythagore, ou 45/32 pour une gamme naturelle.
A noter que les sirènes d'alerte fixes sont en revanche basées sur un son modulé en fréquence (avec signal en dent de scie si électronique, produisant l'ensemble des harmoniques entiers pairs et impairs), avec une montée progressive à une valeur nominale de :
- 380 Hz mais avec 4 descentes intermédiaires par cycle à environ 280 Hz et 1 descente à environ 80 Hz entre chaque cycle